Si te gusta la tecnología y la robótica, debes haber escuchado sobre las peleas de robots. En Estados Unidos hay una muy popular, con su propio canal de youtube y que anualmente reúne equipos de hobbistas (aficionados) que construyen robots con armas letales y los ponen a pelear en una arena. Son un verdadero espectáculo y el público los vive casi como un partido de fútbol o una pelea de lucha libre.
Japón también es uno de los íconos de competencias de robots. Suelen haber muchas categorías distintas y las auspician las empresas como Toyota, Mitsubishi o SoftBank. Algunas son más académicas, como la RoboCup, donde se usan robots humanoides y se presentan papers; mientras que otras, como la Micromouse Competition son abiertas al público general, donde hay de todo tipo de máquinas robotizadas.
¿Por qué existen? Porque son excelentes vitrinas para vincular el conocimiento de frontera en robótica con el mundo real y la sensación que dejan es que la realidad -aunque se demore- siempre supera a la ficción.
¡También hay en Chile!
En Chile y Latam estas competencias existen desde hace poco y la semana pasada se llevó a cabo la tercera versión de la Beauchef Robotics Challenge (BRC), un evento de robótica amateur, de la facultad de ingeniería de la Universidad de Chile, y que tuvo dos ligas: velocidad y combate. En velocidad hubo categoría escolar, universitaria y abierta; y en combate universitarios de la Universidad de Chile y abierta.
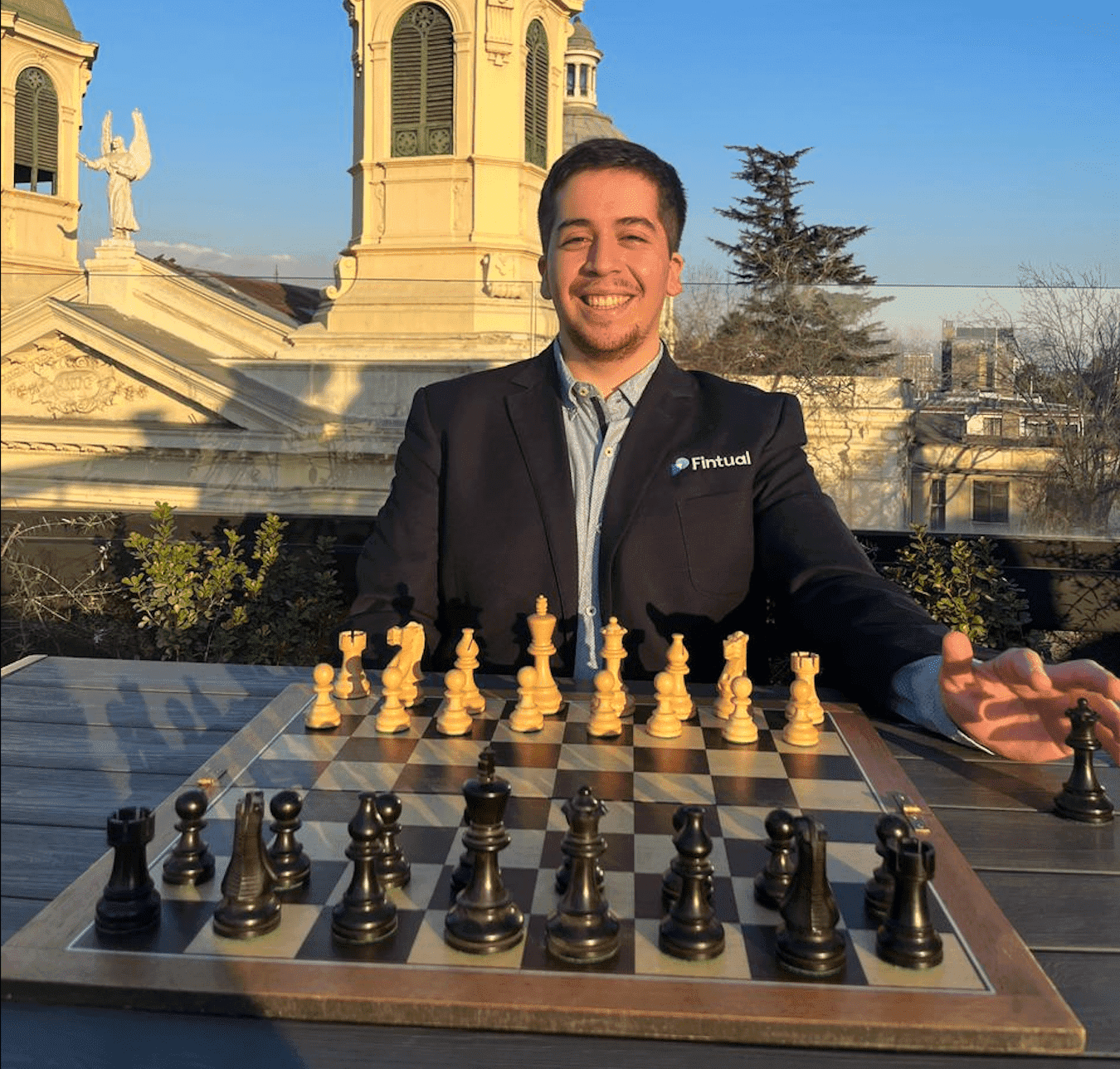
Como en Fintual tenemos flexibilidad de horario y de vacaciones, me pedí el día para participar del evento.
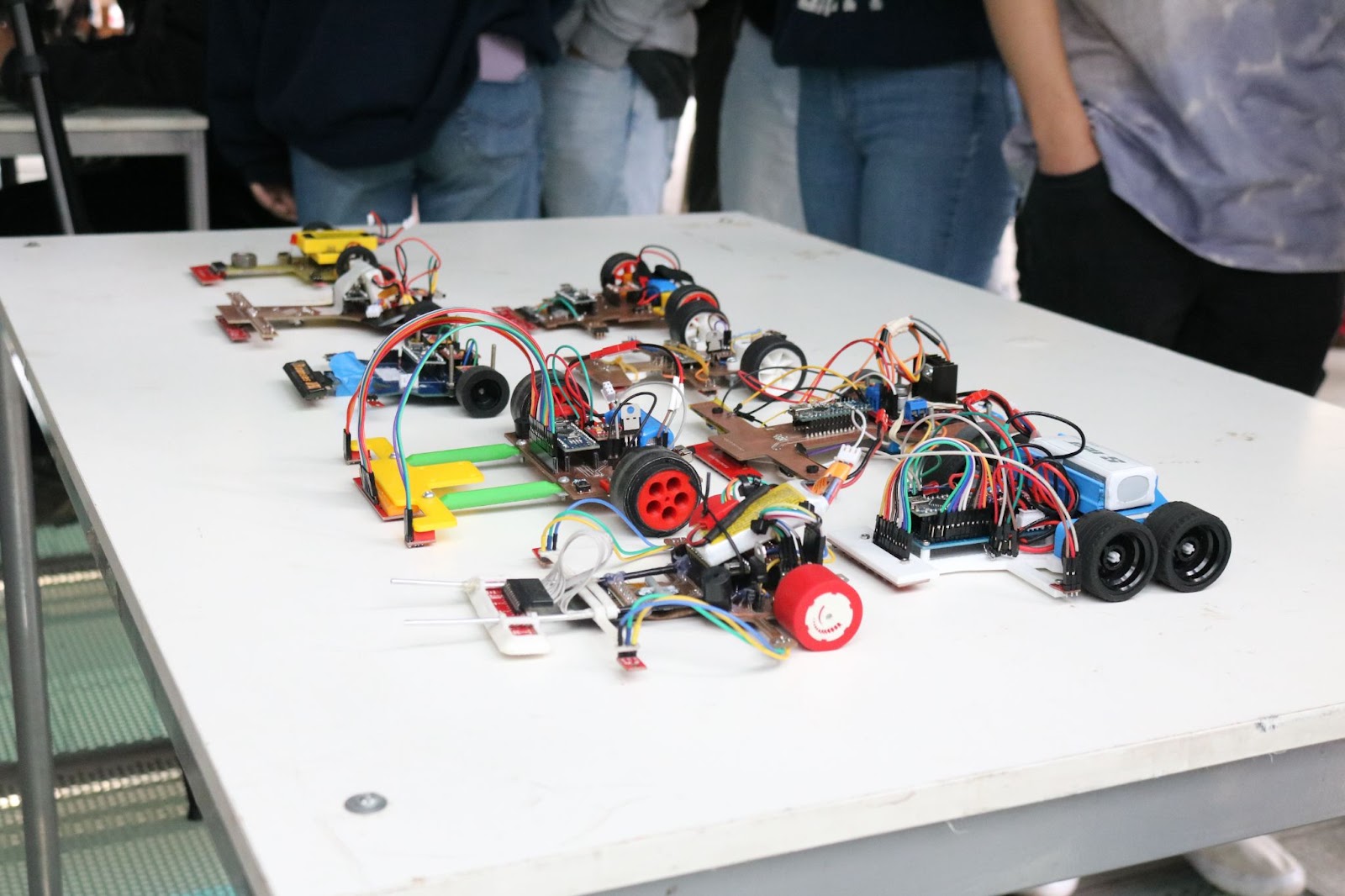
¿Con qué me encontré? Un sueño de la adolescencia hecho realidad: dos plataformas donde se llevaban a cabo las competencias, rodeadas de mesones de trabajo llenos de electrónica, computadores y cables, allí cada equipo hacía los últimos ajustes para que sus robots ganaran la competencia. El público aportaba la cuota de euforia cada vez que un robot acertaba o fallaba en su objetivo.

Lo más bonito es confirmar que en Chile existen las mismas capacidades intelectuales para construir algo al nivel de lo que vemos en las competencias de fuera. Quién sabe si en un futuro no tan lejano logramos que un equipo chileno compita en eventos abiertos en el extrajero.
Puedes ver el registro de la BRC en su página de instagram y acá te cuento un poco en qué consistieron los desafíos de las ligas de este año, por qué son importantes y cuáles fueron sus resultados 👇
Liga Velocistas
Hacer que una máquina se mueva rápido es un problema resuelto desde hace bastante tiempo (autos, trenes, etc.), pero hacer que recorra una pista desconocida, en el menor tiempo posible, es uno de los desafíos de la ingeniería aún vigentes.
La competencia de velocidad del BRC es una versión simplificada, pero bien ingeniosa de este problema y es excelente para comenzar a aprender sobre robótica y mecatrónica.
En una plataforma color negro se traza una pista de carreras con una cinta blanca. Tiene una serie de curvas, cada una con marcas por el lado izquierdo de la pista, que señalan cuándo hay cambios de curvatura, y otras marcas por el costado derecho de la pista, que señalan la partida y la meta.

Los robots tienen que identificar la pista y recorrer al menos una vuelta, sin salirse de ella y ¡sin ayuda de humanos! Para esto tienen sensores de luz, que detectan las diferencias entre negro y blanco para saber si están siguiendo la línea o si se aproxima una curva.
Este año la categoría escolar se la llevó un equipo “Milcabots”, conformado por jóvenes de Puerto Montt (apoyados por Fundación Mustakis), marcando 17,17 segundos. La categoría universitaria la ganó el equipo “Thermics” de la U de Chile, con una marca de 18,81 segundos.

Sorpresa en la categoría Open
La categoría Open fue bien especial porque tuvo un solo contendor que logró completar una vuelta, el equipo Solsticio, compuesto por un ingeniero de telecomunicaciones, un candidato a PhD y un profesor de ingeniería mecánica. Presentaron un robot muy distinto al estándar y marcaron unos lentísimos 70 segundos! Corrieron solos, obtuvieron el peor tiempo de todas las categorías (leíste bien, el peor tiempo) y ganaron primer lugar. Sin embargo, su robot es de esas ideas que te recuerdan que la solución habitual es solo una dentro de un mar de posibilidades.
El robot clásico de esta liga tiene un solo tren de 2 ruedas, donde ambas generan tracción, más una extra de apoyo/equilibrio. Avanzar en línea recta requiere que ambas ruedas vayan a la misma velocidad, mientras que para girar se hace que una vaya más rápido que la otra; controlar esto último es lo más difícil, ya que el radio de cada curva es distinto y puede ser variable.
Lo que mostró Solsticio es over-engineering de manual: tenía 5 ruedas (en configuración de X), donde la central es la que hace avanzar al robot, mientras el tren trasero y delantero solo giran para darle dirección (no hacen tracción). No hay velocidades diferenciales, lo que hace que la curvatura solo dependa del ángulo entre los trenes. “¡Qué clever!” pensé cuando vi el robot.


Su modelo es OpenSource y está disponible en github https://github.com/Solstici0/gnium
Liga Combate: las famosas peleas de robots
Hollywood nos ha acostumbrado a pensar que los robots nos van a dominar y que tendrán conciencia e inteligencia propia. Que como son de materiales duros, son casi indestructibles y que en un futuro cercano encontrarán el momento para decirnos “hasta la vista, baby”. La verdad es que falta mucho para eso e incluso hay ONGs ya proponiendo acuerdos para limitar el desarrollo y uso de estas máquinas con fines bélicos.
Mientras la humanidad resuelve este problema ético, desde hace años existen las peleas de robots, donde dos o más máquinas se enfrentan en una arena con el objetivo de destriparse. Desde hace unos años en la facultad de ingeniería se imparte un curso de segundo año, donde las estudiantes diseñan y fabrican estas máquinas, ya que son un desafío de ingeniería excelente para introducirse en la robótica y mecatrónica.
En simple, la competencia consiste en que cada equipo construye un robot de no más de 40x40x40 cm que debe trasladarse, girar y accionar una sola arma. La pelea se gana por puntos, como en el Judo, donde cada golpe y daño se categoriza por jueces. Si un robot no se mueve por 15 segundos, el contrincante gana por Knock-Out.
Cosas a tener en cuenta para diseñar tu robot
Lo entretenido de estas reglas es que, aunque parecen sencillas, dan lugar a un montón de estrategias y trade-offs para diseñar el robot:
- Si quieres asegurar un KO, intenta voltear a tu rival, así no podrá moverse.
- Si quieres evitar un KO, agrega un mecanismo para volver a ponerte en pie o haz que en cualquier orientación, tus ruedas toquen el suelo.
- Agregar un mecanismo para volver a ponerse de pie es costoso y hace que el robot sea menos ágil por el peso extra.
- Si tus ruedas siempre tocan el suelo, las hace vulnerables a que las ataquen directamente para destruirlas, porque suelen ser blandas.
Puedes estar toda la tarde analizando la geometría ideal, qué materiales usar, qué arma usar, etc. Si además las partes del robot las pagas tú, habrá que agregar en la mezcla cómo proteger al máximo posible ese motor carísimo que compraste para que el robot sea más ágil.
Esta edición la ganaron dos robots cuya estrategia era voltear a su contrincante con un arma giratoria de alta inercia:

La BRC fue organizada por la Comunidad de Robótica de la Universidad de Chile, en conjunto con FabLab UChile, Beauchef Proyecta y varias otras organizaciones.